,fit=pad/globalassets/logos/stahl/stahl_color-10.11.svg)
,fit=pad/globalassets/logos/yale/new/yale-10.11.svg)
,fit=pad/globalassets/logos/pfaff/new/pfaff_color-10.11.svg)
,fit=pad/globalassets/logos/magnetek/new/magnetek_wide_color-10.11.svg)
,fit=pad/globalassets/logos/dorner/new/dorner_color-10.11.svg)
,fit=pad/globalassets/logos/duff-norton/new/duff-norton_color-10.11.svg)
,fit=pad/globalassets/logos/cm-et/cmet-color.svg)
,fit=pad/globalassets/logos/cm/new/cm_color-10.11.svg)
,fit=pad/globalassets/logos/garvey/new/garvey_color-10.11.svg)
 EMEA - EN
EMEA - EN
,fit=pad/globalassets/logos/stahl/stahl_color-10.11.svg)
,fit=pad/globalassets/logos/yale/new/yale-10.11.svg)
,fit=pad/globalassets/logos/pfaff/new/pfaff_color-10.11.svg)
,fit=pad/globalassets/logos/magnetek/new/magnetek_wide_color-10.11.svg)
,fit=pad/globalassets/logos/dorner/new/dorner_color-10.11.svg)
,fit=pad/globalassets/logos/duff-norton/new/duff-norton_color-10.11.svg)
,fit=pad/globalassets/logos/cm-et/cmet-color.svg)
,fit=pad/globalassets/logos/cm/new/cm_color-10.11.svg)
,fit=pad/globalassets/logos/garvey/new/garvey_color-10.11.svg)
PHOENIX Robotics Lifting Column Universal Robots Version









The PHOENIX Robotics UR Version is our lifting column equipped with specialized software for UR robot applications. It has been tested together with our partner Universal Robots and is officially approved for collaborative use.
The lifting column extends the working range of UR cobots by adding a precise vertical axis. It offers maximum stability, easy integration, and high flexibility for collaborative robot applications.
The PHR lifting column is a modular, vertically movable lift system consisting of three telescopic profile columns. These are used for linear height adjustment of equipment or loads in industrial environments, ideally for use with cobot robots.
Order number UR Version 70 kg: 192115166, compatible with UR robots: UR3e, UR15
Order number UR Version 70 kg: 192115167, compatible with UR robots: UR7e, UR12e, UR16e
Order number UR Version 130 kg: 192115169, compatible with UR robots: UR20, UR30
Documents
Need Assistance?
Not sure if this is the right product for your application, or need a custom solution? Contact us today for help from an expert.
Documents
Documents
PHOENIX Robotics – The lifting column for smart cobot applications

The customer was looking for a solution to make material flow in packaging more efficient.
The challenge was to automatically transport packages of different sizes from one station to the next without manual intervention. An operator packs the package, places it down, and sends a signal with the push of a button.
The cobot moves into position on a linear axis, while the Phoenix Robotics lifting column handles the vertical movement. A 3D camera system detects the package size and adjusts the gripper arm accordingly. After picking up the package, it transports it to the next station. If the detected object does not match the expected part, an integrated pattern recognition system identifies this and adjusts the process accordingly.
By using the lifting column, a cost-effective solution was implemented without major mechanical changes to the conveyor system. The lifting column performs the lift that a large robot arm could also achieve, but this option was not feasible due to the narrow conveyor layout.
Who is the lifting column particularly suitable for?
,fit=cover/globalassets/solutions/linear-motion/phoenix-pages/integratoren.jpg)
,fit=cover/globalassets/solutions/linear-motion/phoenix-pages/produktionsleiter.jpg)
,fit=cover/globalassets/solutions/linear-motion/phoenix-pages/cobot-production.jpg)
Motor and Encoder
| Condition | Value |
| Voltage | 48 V DC |
Performance Data
| Condition | Value |
| Speed | 125 mm/s (at payload 130 kg) 170 mm/s (at payload 70 kg) |
| Lift | 800 mm |
| Duty cycle | < 40 % / 10 min |
| Accuracy | +/- 1 mm (repeatability up to 0,5 mm) |
Dimensions and Weight
| PHR70-800 | PHR130-800 | |
| Weight | approx. 50 kg | |
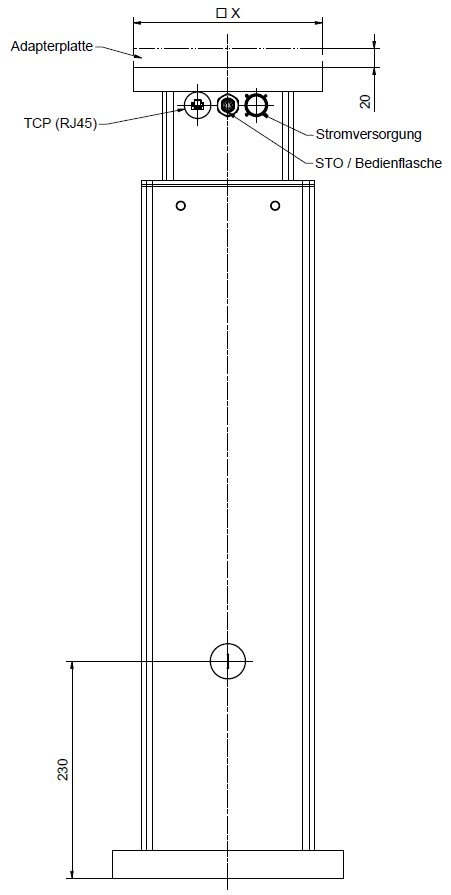
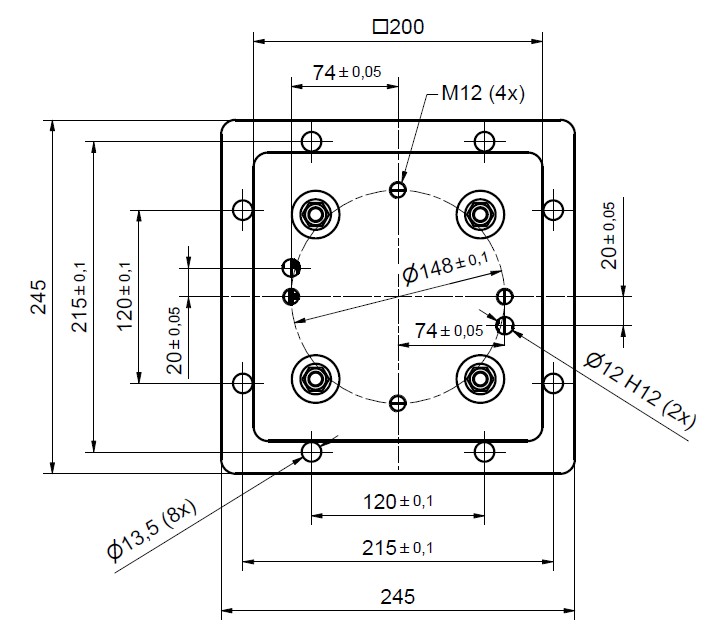
| Base plate dimensions | 200 x 200 mm | |
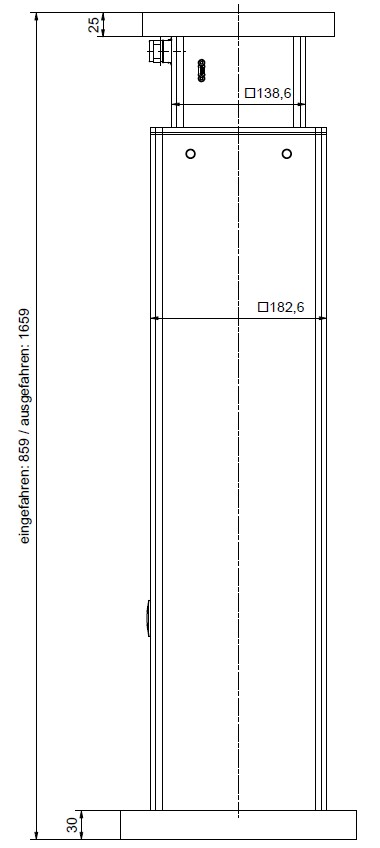
| Lift | 800 mm | |
| Retracted height | 859 mm | |
| Extended height | 1659 mm | |
| Adapter plate for cobot | depends on Cobot | |
Environmental Conditions
| Condition | Value |
| Ambient temperature | 5 - 45 °C |
| Relative humidity | 75 % 95 % for operation under month |